🚗 My Projects: Rovers (Unmanned Land Vehicles)
June 13, 2024 - Reading time: ~1 minute
Hello!
Here I will collect the rovers that I am building.
A rover is a vehicle that travels on the surface of a planet or moon - Earth, Mars, Ganymede, etc.
Rover #1: A robotic bug that avoids obstacles
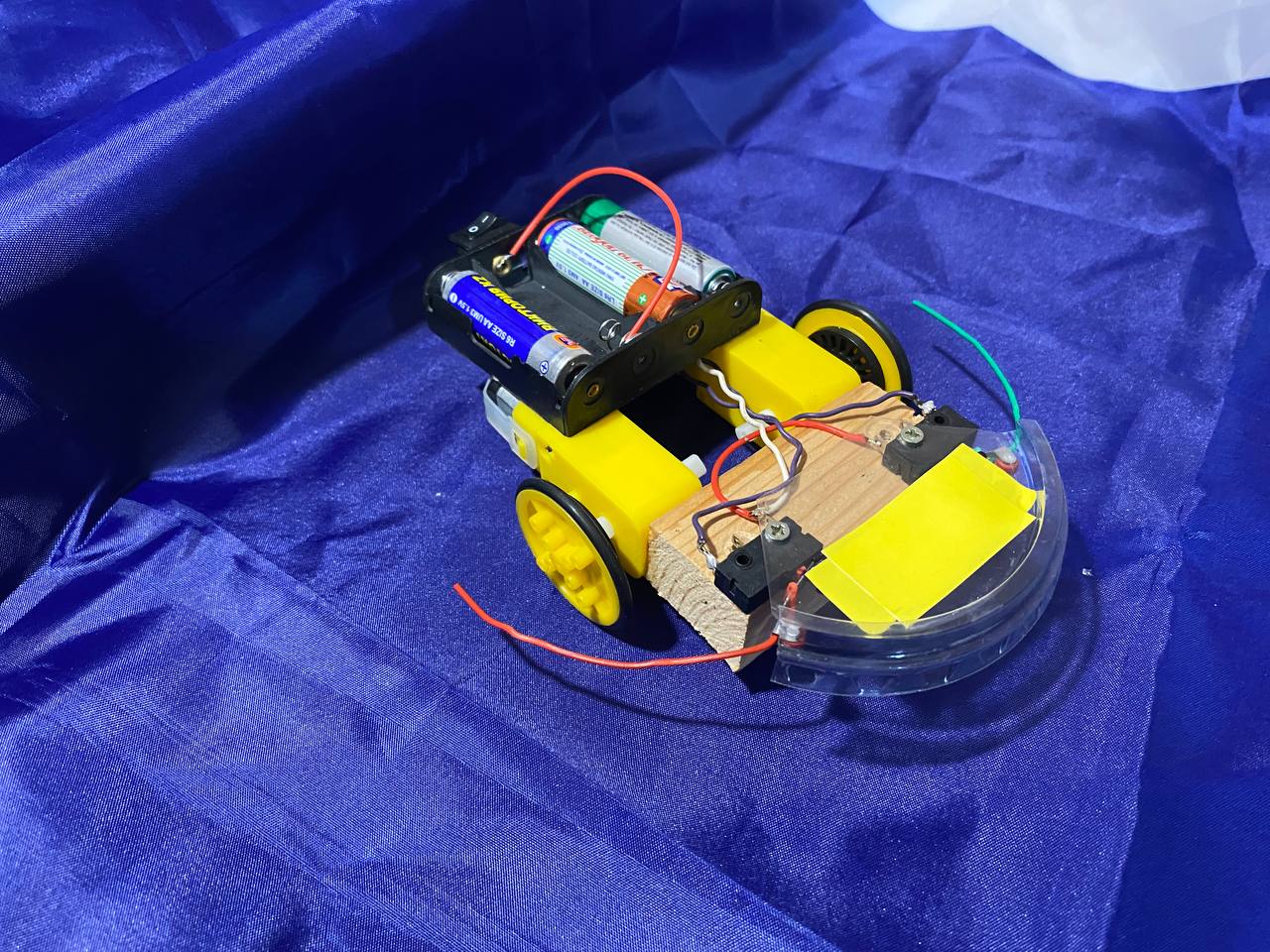
Due to two contact sensors installed crosswise, this robot can avoid obstacles even without sensors and a microcontroller.
Used to practice path-finding schemes (maze, path with obstacles), like an electromechanical model of the behavior of a real beetle.
Rover #2: Walking Robot
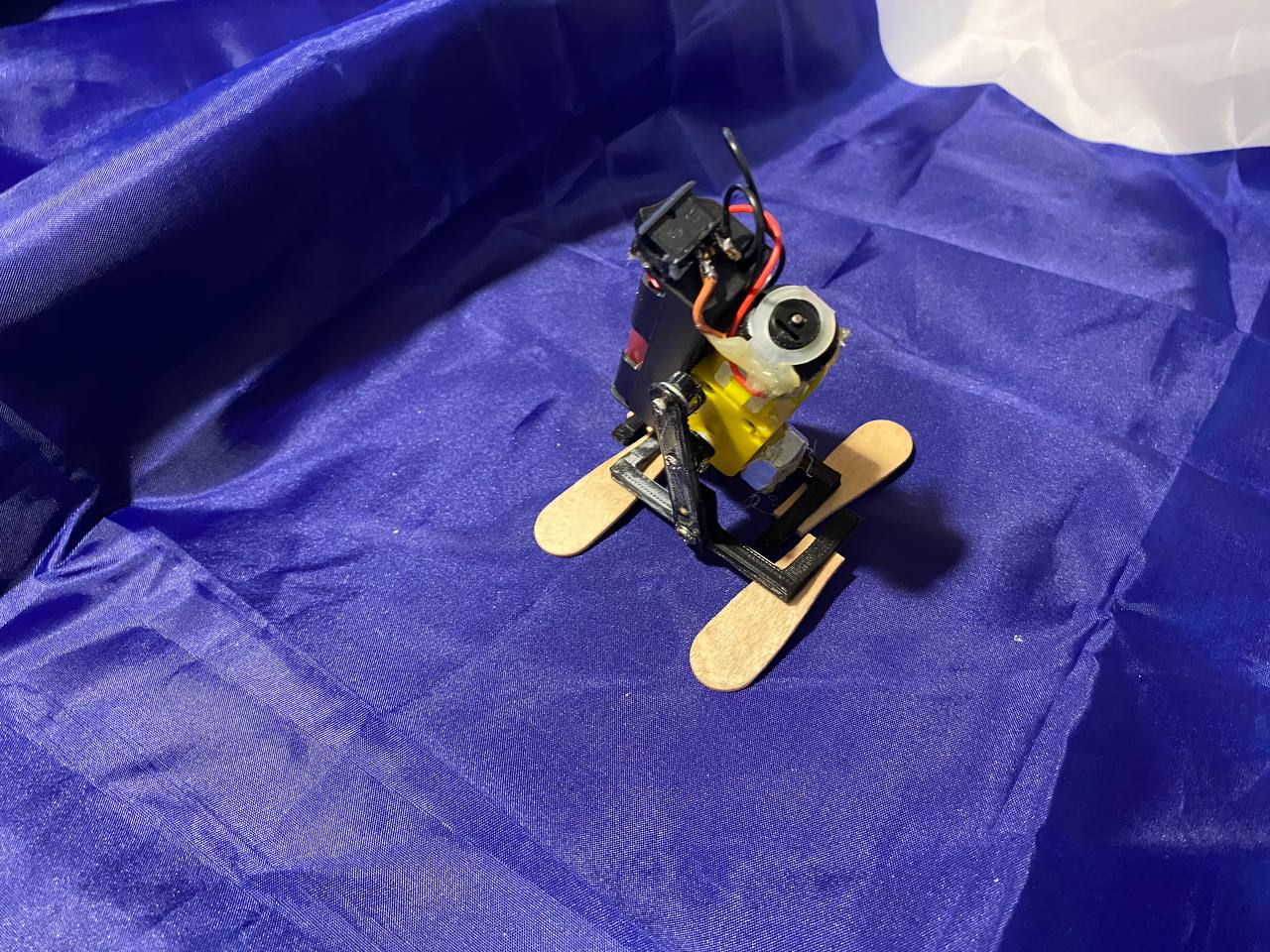
The simplest walking robot with just one gear motor. The kinematics of the crank mechanism are used so that the robot’s “legs” can step forward.
Created to test in practice and test the flywheel design for the robot to “walk” on a flat surface and rough terrain.
It's very simple and primitive, but required me to carefully set up the moving parts.
Rover #3: Robot "running away" from a person
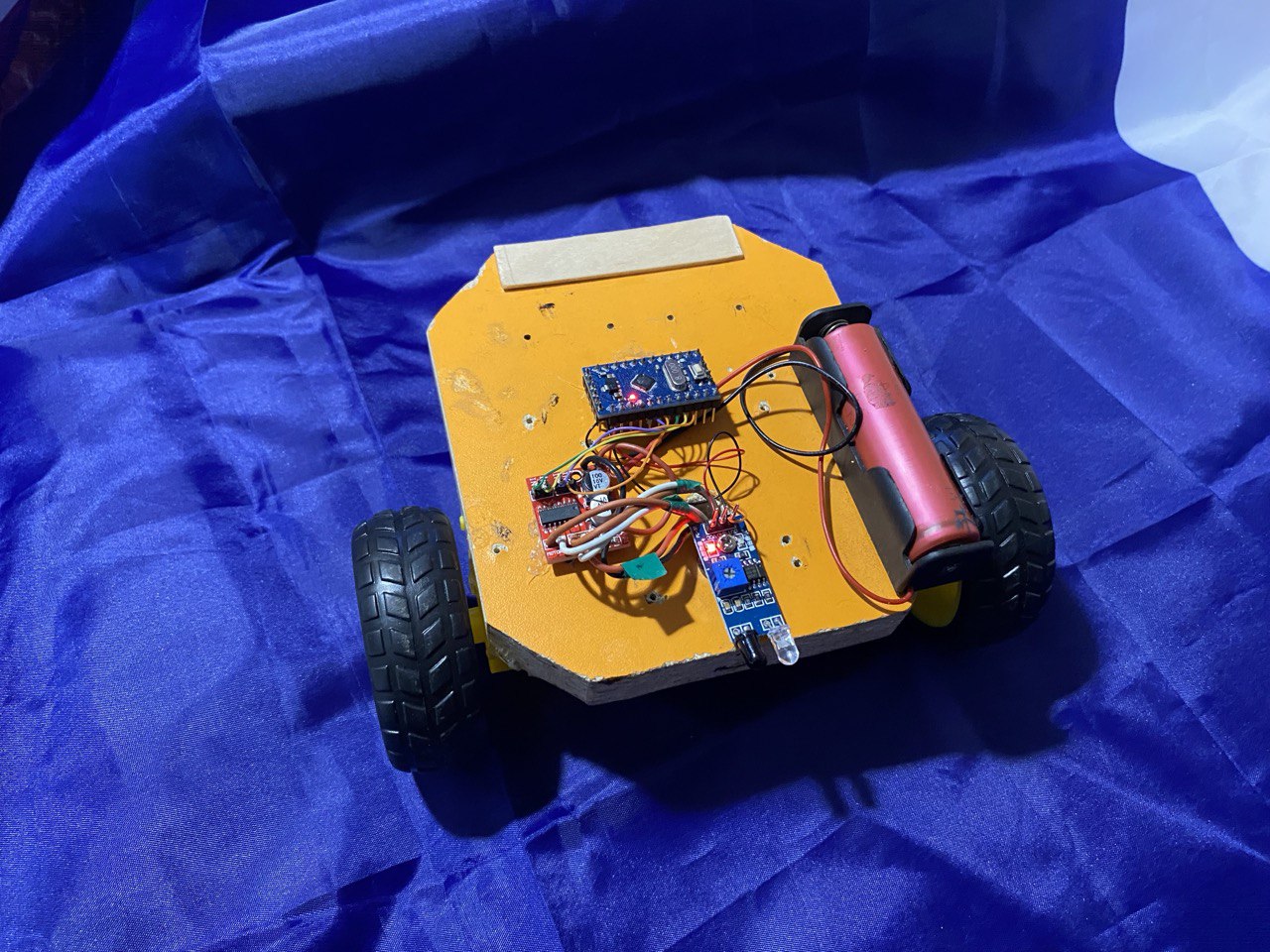
It uses a microcontroller and an ultrasonic distance sensor.
I programmed it for only one function - to “back away”, moving half a meter, if a foreign object appears in front of it (in the range of its ultrasonic rangefinder), for example, a human hand that wants to grab this robot.
The base of this robot allows you to create a lot, having on board an entire microcontroller, a range finder and an independent two-wheel drive.
Rover #4: Robot with voice control for 3 commands
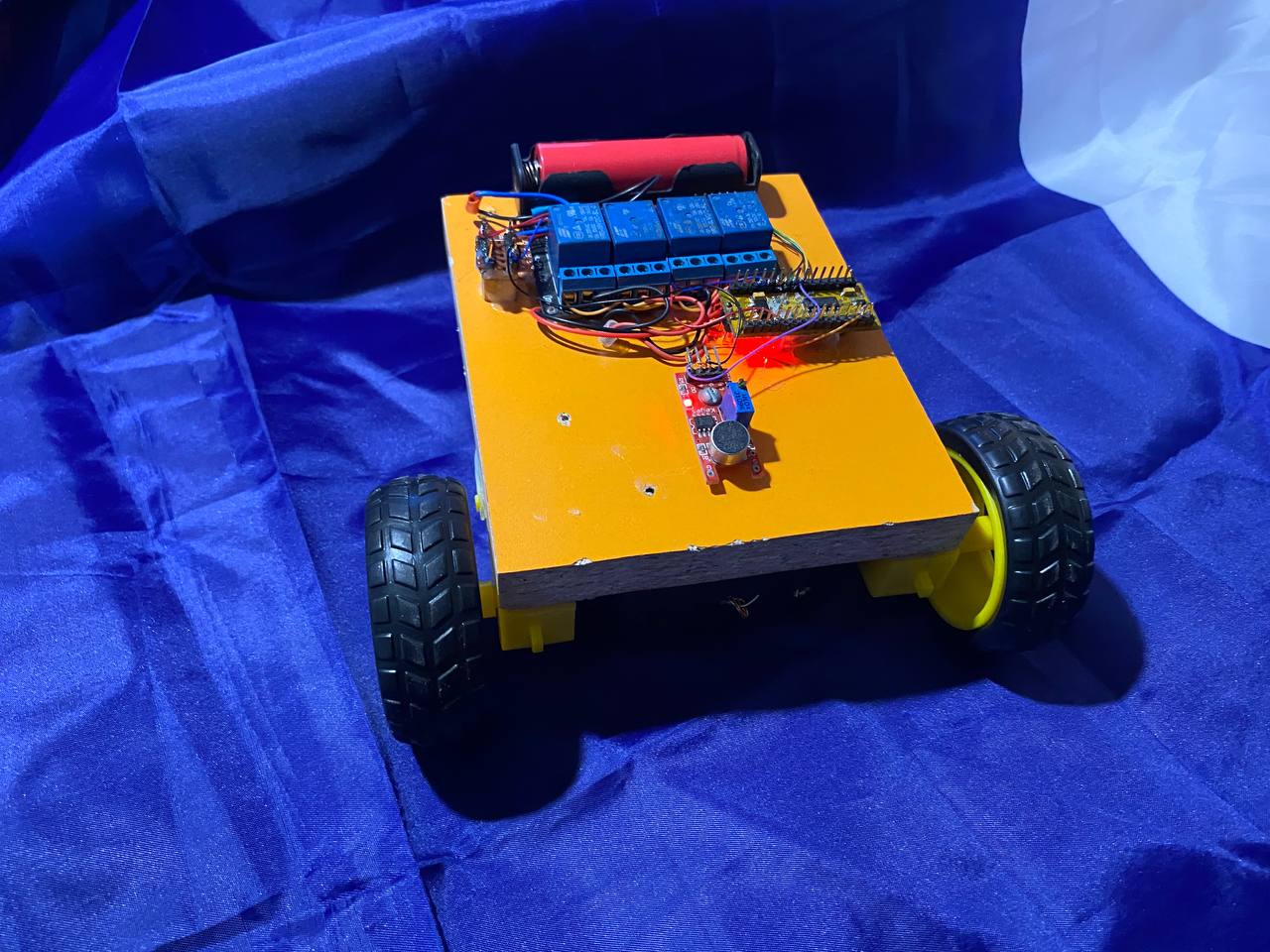
By capturing loud sounds (claps, clicks, screams), this robot can determine the commands that are given to it and carry them out in accordance with the prescribed behavior algorithms:
- 1 clap/click/scream – drive forward 0.5 m,
- 2 claps/clicks/screams – turn right,
- 3 pops/clicks/squeals – turn left.
